ご相談ください、20分で解決します。
どのような要件や具体的な要求をお知らせください、私たちはすぐに解決策を解決し、無料でそれを返送します。.
どのような要件や具体的な要求をお知らせください、私たちはすぐに解決策を解決し、無料でそれを返送します。.
ボアや球体、あるいは滑らかな半径を測って思ったことがあるだろうか:
“この ‘完璧な ’カーブが、なぜわずかに...三つ葉のように見えるのか?”
気のせいじゃないよ。そのパターンはしばしば ロビングエラー-方向依存のトリガー動作 三点支持式(メカニカルスイッチ式)タッチトリガープローブ. .分かりやすく言うと、プローブはどの方向にも全く同じたわみでトリガーするわけではないので、測定された表面には微妙な「三角/3葉」のサインが出ることがある。.
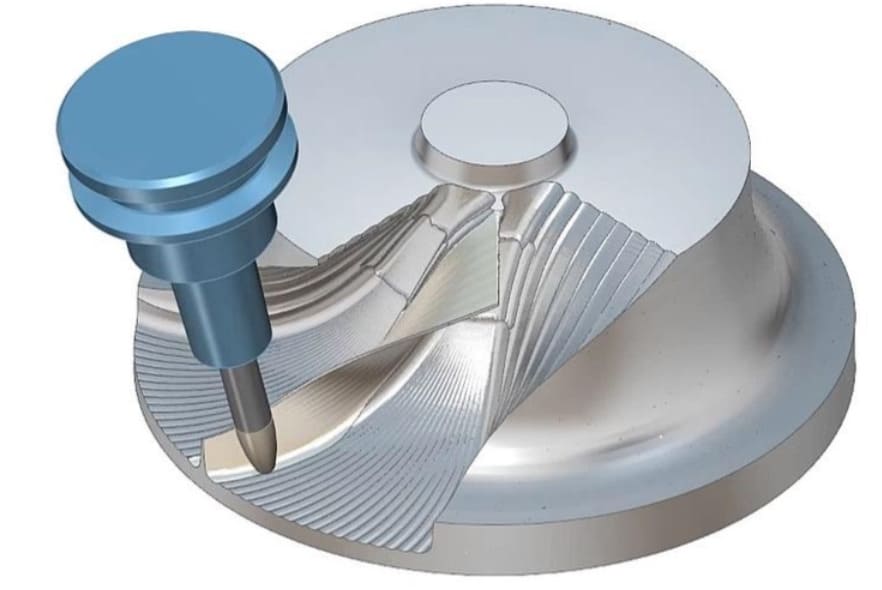
このブログは 曲面でのロビングの低減 (ボア、シリンダー、球体、フィレット、大きな半径)。 表面法線変化 + プローブ・トリガーの方向転換 ロビングをはっきりと見せる。.
キネマティックタッチトリガープローブは、機械的なスイッチング機構を採用しています。必要なトリガー力はプローブの方向によって変化するため、一般的に以下のように呼ばれる小さな形状誤差が生じます。 “ロビング”
平らな面では、単一の一貫したベクトルでアプローチすれば、それで済むことが多い。.
曲線の特徴について:
また、旅行前の行動は、次のような影響を受ける。 トリガー方向、トリガースピード、スタイラスの長さ/細さ, あなたのカーブは、ロビングが絵を描くための完璧なキャンバスになる。.

競合他社の一般的なアドバイスに勝る発想の転換がここにある:
ロービングは多くの場合、安定した方向依存のサインである。.
つまり、あなたはどちらかを選ぶことができる:
ほとんどの店はそのどちらもしない。.
ロビングパターンをより多くの点で見せることができる。 より信頼できる.
ロビングを修正する」前に、簡単な正気度チェックをする:
もしそれが 違う 再現性がある、疑わしい:
トリガースピードを上げるとプリトラベルが大きくなり、プリトラベルは方向によって変化する。.
店のルール
重要な曲面形状には、一般的な検査速度よりも遅く、一定のタッチ速度を使用する。.
スタイラスが長かったり細かったりすると、プリトラベルとスタイラスのたわみの影響が大きくなります。.
実践的な動き:
レニショーでは、メカニカルスイッチを使用した「標準プローブ」ではロービングが発生することがあり、ストレインセンシングプローブ(TP200など)はその方向変動の問題を克服するように設計されていると明確に説明しています。. https://cnc-probe.com/cnc-touch-probes/
すべてを交換する必要はないが、もしあなたのビジネスがボアや球体のタイトなフォームで成り立っているのであれば、これはソースでのロービングを減らすことができる数少ない変更のひとつだ。.
もし、常に 同じプローブの向き, つまり、プローブの方向性がポイント間で変化するのを抑えることができます。これは、CMM/CNCプローブ計測のユーザーの間では、実際によく行われていることです。. https://cnc-probe.com/cnc-touch-probes/
カーブへの塗り方
ヘッドを回転させ、プロービングの方向を良好に保つことは有効だが、それは資格と測定方法が一致している場合に限られる。.
ISOスタイルのプロービング性能テストでは、球面上で複数の方向からプロービングすることが明示されている(方向が重要なため)。.
現場の翻訳:
3~5種類のヘッド角度で内径を測定する場合は、それらの角度を適切に認定し、測定パターンに類似した球体試験プログラムで検証してください。.
ボア周辺に均等に多くのポイントを取ることは、実際に可能である。 ロービング形状を再構築する 美しく。.
その代わりだ:
測定ソフトウェアには、測定前に先端位置と直径を知るための正確なプローブ先端の校正/適格性確認が必要です。.
しかし、“資格がある ”というのは “ロービングに強い ”という意味ではない。”
に関する確立された研究がある。 タッチトリガープローブ誤差補正 一般化されたプローブ誤差モデルやニューラル・ネットワーク・アプローチを使用することで、場合によっては大幅な誤差の減少が報告されている。.
現実の世界では、簡易版ができる:
これは、スタイラスを遅くしたり短くしたりするよりも手間がかかるが、1桁ミクロン単位のフォームを追い求める場合には、これが勝利への近道となる。.
曲線の形状が重要な場合(ボア、球、半径):

変わることは可能だ:
...実際に真実を改善することなく。.
そのため、ISO スタイルの考え方では、プローブ計測の性能を CMM システムと一体化したものとして扱い、球体や多方向プローブ計測などの試験成果物を検証に利用しています。.
実際には
ロービングの “修正 ”は、再現可能なアーティファクト・テストとその前後の比較によって確認されるべきである。.